西門子SIMATICHMIKP8/KP8F/32F 
SIMATIC HMI KP32F 和 HMI KP8 
空的前端 
空的前端 SIMATIC HMI 按鍵式面板 - 具有大號機械按鍵和多種顏色的照明燈(日光下可讀),十分易于操作
- 接線和安裝時間節省 60% 以上(即插即用)
- 與常規鍵盤式操作員面板相比,材料成本節約 30% 以上
- 2 個集成 PROFINET 端口(含交換機),用于設置總線型和環型拓撲
- 可自由組態的數字量 I/O 可在后面連接其他鍵控開關、指示燈等
- 可連接 KP8F 和 KP32F 的故障安全急停按鈕或其它故障安全信號(SIL2 或 SIL3)
- 在功能上兼容所有標準 PROFINET 主站 CPU,也兼容非西門子 CPU
- KP8 及空白前端設計,還針對安裝在防護等級為 IP65 的 IPC 擴展單元中進行了優化
- 可進行參數設置,極為靈活
- 采用空白前端設計,適合對靈活多樣的操作員面板進行標準化組裝
 西門子KP8F按鍵式面板 西門子KP8F按鍵式面板西門子日前發布面向工業自動化的HMI觸摸屏——第二代有線移動面板。此面板的產品性能、靈活性和便捷性相較前代產品都全面升級。 
1.)新一代SIMATIC HMI移動面板的產品性能、靈活性和便捷性得以全面提升 2.)7寸或9寸高亮寬屏顯示,顯示面積增大40% 3.)創新的“緊急停止"按鈕,輕松集成安全自動化 4.)緊湊型接線盒非常適用于小型設備電 話:(同號) 新一代SIMATIC HMI移動面板的產品性能、靈活性和便捷性得以全面提升第二代IP65操作面板適用溫度范圍廣(0-45°C),且具有防塵、耐腐蝕和防水性的特性。這款兼具按鍵和觸摸操作功能的面板,可通過Profinet集成至自動化解決方案,并可用TIA博途SIMATIC WinCC和創新的Style Editor進行組態。該面板采用標準更加嚴苛的工業設計,能承受zui高1.2米的跌落沖擊,具備SIMATIC HMI精智面板的所有功能,它可用于配置同時適合靜態和移動應用的操作顯示畫面。 
7寸或9寸高亮寬屏顯示,顯示面積增大40%第二代有線SIMATIC HMI移動面板采用高寬比為16:9的7寸或9寸高亮1,600萬色寬屏顯示,顯示面積增加40%,可清晰呈現圖像細節。此外,它的亮度還可調節,這意味著它能輕松適應不同的應用環境。 創新的“緊急停止"按鈕,輕松集成安全自動化其他亮點包括*的“緊急停止"按鈕。帶停止/緊急停止按鈕的移動面板配備了創新的按鈕指示燈,該按鈕指示燈只在移動操作面板與安全電路連接時才工作,滿足當今用戶對移動操作面板能夠直觀停止和安全緊急停止的功能需求。相比以前的型號,新一代移動面板的易用性也更強。譬如,面板把手上的三級確認按鈕現在擁有兩個清晰的觸覺反饋點。 緊湊型接線盒非常適用于小型設備新的緊湊型接線盒占用空間只有以前產品的三分之一,可以直接安裝在機柜上,因此特別適合占地面積小的小型設備。該接線盒只需用螺栓安裝在機柜門的外面,然后再從里面連接所有電纜。長度在2到25米之間的堅固連接電纜,可確保操作員擁有足夠的活動空間。新的移動面板還配備免維護儲能系統,在操作員需要切換接線盒而斷電時,它能在5分鐘內讓移動面板繼續正常運行。 具有模塊化設計,與采用分立部件相比,規劃和組裝工作量減少- 節約硬件成本:分布式 I/O,一個設備中組合有 2 個 PROFINET 接口和 I/O
- 可使用標準打印機(黑白或彩色)打印按鍵和燈的標簽,防護等級為 IP65
- 靈活性高,可對顏色、開關/按鈕功能和集成診斷功能進行任意組態
- 可針對過程對任何按鍵顏色進行動態調整
- 具有用于執行器和傳感器的集成標準輸入和輸出,每個針腳都可用作輸入或輸出
- 空白前端設計為隨后進行的系統擴展預留了空間,便于安裝標準 22.5 mm 操作部件
- SIMATIC 人機面板系列中的功能與設計實現了匹配,例如,PRO 設備擴展單元中的功能與設計。
- “F”型號具有 SIL 2/3 安全等級,例如,可直接連接急停按鈕
1.4 HMI側的啟停和給定設置

說明:
(1)給定的IO域連接到變量P2900對應于變頻器參數P2900; (2)點擊啟動按鈕---事件---點擊---翻轉變量位(InverBitInTag)---連接變量P2098_1 (對應
于變頻器參數P2098[0])---選擇第0位。
2 變頻器側的設置
2.1通信只需要設置CU的站地址 2.2 參數設置、起停和給定的連接邏輯見下圖: 
變頻器的參數連接為:電 話:(同號)
P1070[0]=P2900
P840[0]=r2094.0(其中r2094.0自動連接到P2098[0].0)
其它相關參數請參見S120調試手冊。 
說明:P840[0]=r2094.0(r2094.0=P2098[0].0自動關聯) 
說明:P1070[0]=P2900(P2900對應變頻器內的可設置固定值,可通過HMI更改) 2.3 通信診斷和響應處理
變頻器側的通信診斷及通信故障響應邏輯見下圖: 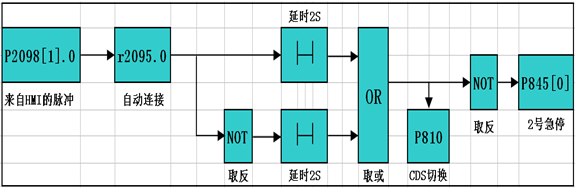
說明:
r2095.0是來自HMI的脈沖信號,檢測該信號為常1或常0達到2S后,認為通信故障。
變頻器OFF2停車,并切換命令參數組到端子或面板控制(由用戶根據需要設置)。
2.4 變頻器側通信相關參數的設置
激活S120的自由功能塊功能,方法如下:

說明:
(a) 右擊“VECTOR_03”選屬性---選擇“function modules”---勾選自由功能塊---OK。
(b) P20000[0]選擇8*r20002。用于設置自由功能塊執行組0的掃描時間,要求zui小為
1ms。參數形式為N*r20002,其中r20002為時基,對于驅動對象其值一般0.125mS。 (1)設置PDE0(延時通定時器),用于檢測r2095.0的信號在2S內是否為常1。 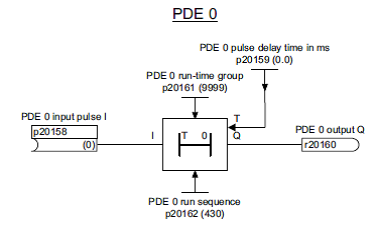
P20158= 2095.0(檢測脈沖信號是否為常1)
P20161=0(選擇執行組0)
P20162=1(在執行組0中的執行順序為1)
P20159=2000(設定延時時間為2S)
r20160定時器0的輸出,送給OR0輸入1。 (2)設置NOT0功能塊(對脈沖信號進行取反以檢測常0信號) 
P20078=R2095.0(脈沖信號)
P20080=0(在執行組0中執行)
P20081=2(在執行組0中的執行順序為2)
r20079(取反后的信號輸出,送給PDE1輸入) (3)設置PDE1(延時通定時器),用于檢測r2095.0的信號在2S內是否為常0。 
P20163= R20079 (檢測脈沖信號是否為常0)
P20166=0(選擇執行組0)
P20167=3(在執行組0中的執行順序為3)
P20164=2000(設定延時時間為2S)
r20165定時器1的輸出,送給OR0的輸入2 (4)設置OR0功能塊(將常1和常0檢測結果相或) 
P20046[0]= R20160 (常1檢測結果)
P20046[1]= R20165(常0檢測結果)
P20046[2]=0
P20046[3]= 0
P20048=0(在執行組0中執行)
P20049=4(在執行組0中的執行順序為4)
R20047或信號的輸出。該信號一方面直接送給P810用于切換命令組;另一方面送
給的輸入。電 話:(同號)
(5)設置功能塊,對檢測結果取反后送給OFF2停車源2(P845[0]) 
P20082= r20047 (取自OR0輸出)
P20084=0(選擇執行組0)
P20085=5(在執行組0中的執行順序為5)
r20083 的輸出,送給OFF2停車源2(P845[0]) (6)zui終信號連接
P845[0]= R20083( 的輸出信號)
P810= r20047(OR0的輸出信號)
即當檢測到通信故障時,變頻器OFF2停車,以保證設備和人身安全;同時將命
令數據組2激活,若設置了其它命令數據組,則可避免因通信故障而導致變頻器無
法運行。 在 HMI 上顯示 Cam
當項目運行時,為了能在HMI上以圖形方式顯示項目中生成的Cam曲線,目前有一個方法實現此功能,就是調用功能塊 FBGetCamValueForHMI 將Cam的位置輪廓顯示在HMI上。 1.1 FBGetCamValueForHMI 功能塊
在 simotion的程序單元中調用FBGetCamValueForHMI 功能塊,還需要在 WinccFlexible中進行相關配置。
在調用 FB功能塊前,Cam必須使用系統函數_interpolateCam 進行插補。
在HMI系統上顯示的點數定義在數據常量 giNR_OF_SET_POINTS 中,從值保存在數組中,zui大的點數為 999,也就是說常量 giNR_OF_SET_POINTS 不能超過 999。如果改變此常量的默認值,需在WinccFlexible中必須進行相應的配置。
Cam圖形在WinccFlexible中的輸出是以線性類型來表示的。
功能塊讀出與固定主值相關的從值并且將它們寫入到一個數組中。主軸距離由Cam的系統變量來計算 ("leadingrange.start"-"leadingrange.end") /NR_OF_SET_POINTS。系統功能塊 _getcamfollowingvalue 用于讀出從位置值。
注意:
由于可能會造成較高的系統負荷,所以建議此功能塊在 motion task中調用。 1.2 調用FB
在插補生成 Cam曲線后,可以調用 FB 塊。必須在WinccFlexible中設置趨勢指針 Transfer1,它觸發WinccFlexible中的Cam曲線顯示。
"Trend Request" 指針在WinccFlexible中進行設置,指示當前顯示的Cam。
示例: 調用FB 后,如果使用圖像顯示功能顯示Cam曲線,則在simotion中創建指針變量:
• myTrendTransfer : 在HMI中設置的指針 "Trend Transfer1"
• myTrendRequest : 在HMI中設置的指針 "Trend Request" 1.3 在WinccFlexible中配置HMI
"cam display" 功能用于在WinccFlexible中顯示Cam。一個 cam 需要一個 "cam buffer" , 在此數組中填入FB的 INOUT變量 "SlaveValues" 。此外,Cam顯示必須通過一個指針觸發。 1.4 FB的輸入/輸出接口
表 1-1: FBGetCamValueForHMI 參數描述 | 名稱 | 參數類型 | 數據類型 | 描述 | | cam | IN | CamType | 被顯示的Cam | | camType | IN | EnumCamPositionMode | 顯示帶或不帶比例縮放(BASIC / ACTUAL) | | slaveValues | IN/OUT | aSlaveCamValue | 決定從位置的數組 | | minSlaveValue | OUT | REAL | 從位置的開始值 | | maxSlaveValue | OUT | REAL | 從位置的結束值 | | minMasterValue | OUT | REAL | 主位置的開始值 | | maxMasterValue | OUT | REAL | 主要位置的結束值 | | 注: 參數類型 IN = 輸入參數,OUT = 輸出參數,IN/OUT = 輸入/輸出參數 |
1.5 LAD 示意圖 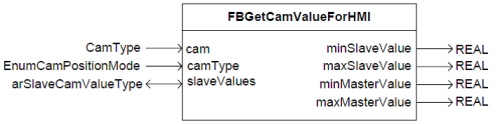
圖1: FBGetCamValueForHMI 的LAD示意圖
2 功能塊的調用編程及HMI設置 在用戶項目中,該功能是用于在觸摸屏上顯示Cam曲線。
2.1 Simotion中創建Cam
首先要創建Cam: 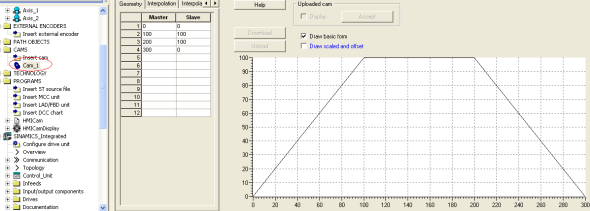
圖2: 創建Cam曲線
2.2 Simotion中Cam顯示功能塊的編程
(1) 導入FBGetCamValueForHMI 功能塊
右鍵點擊項目導航中的“Program”,在彈出的菜單中選擇“Imporrt external source-ST source file”導入功能塊源文件: 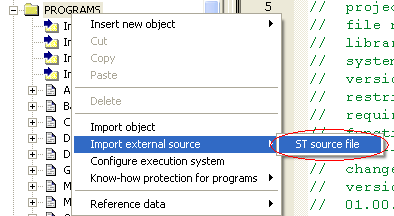
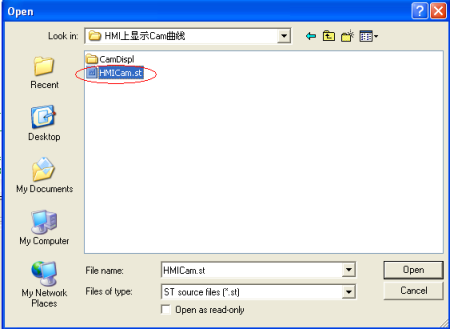
圖3: 導入ST源文件
(2) 創建程序單元及全局變量 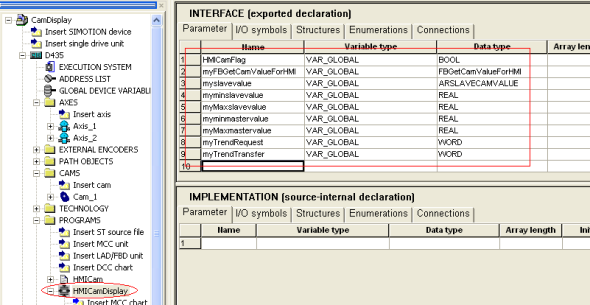
圖4: 創建全局變量
(3) 在HMICamDisplay程序單元中連接功能塊程序單元 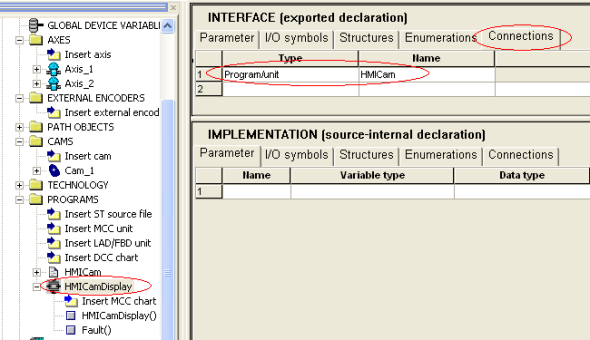
圖5:連接調用的程序單元
(4) 用MCC語言編輯Cam曲線顯示程序(調用功能塊FBGetCamValueForHMI) 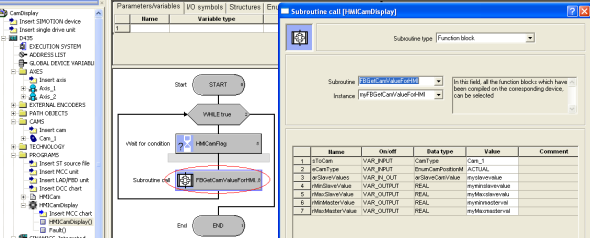
圖6:連接調用的程序單元
(5) 將程序分配到simotion系統執行級中 
圖7: 程序分配
2.3 WinccFlexible中HMI設置
在HMI中使用了一個特殊的方法,即在控件TrendView中顯示數組曲線的方法來實現Cam曲線的顯示:
(1) 建立simotion與HMI的連接電 話:(同號) 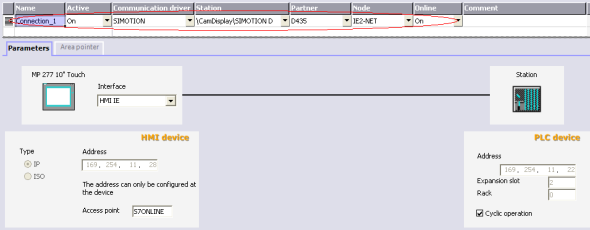
圖8: 建立simotion與HMI的連接
(2) 創建HMI變量
僅用于顯示Cam曲線的變量Tag有: 
這些變量在SIMOTION中已創建。其中myslavevalue為Cam曲線數據,而mytrendrequest以及mytrandtransfer用于控制HMI什么時候讀取Cam曲線。
注意:
設置myslavevalue的訪問方法為cyclic continuous或on_command: 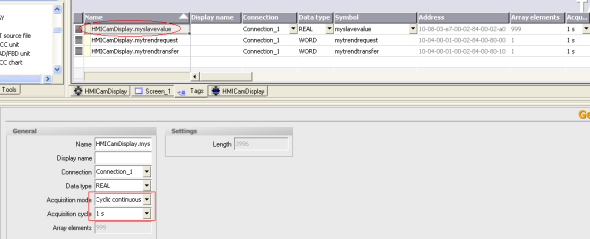
圖9: 設置myslavevalues的訪問方法為cyclic continuous
(3)在HMI上插入一個顯示趨勢圖控件TrendView
在其屬性->Properties->Trend中設置如下: 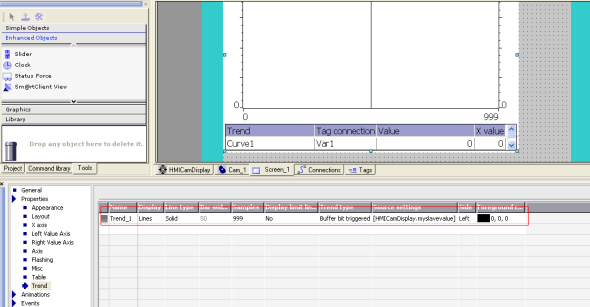
圖10: 趨勢圖設置
其中Samples的數量與FBGetCamValueForHMI中獲取的點數相同,在Source settings中設置如下: 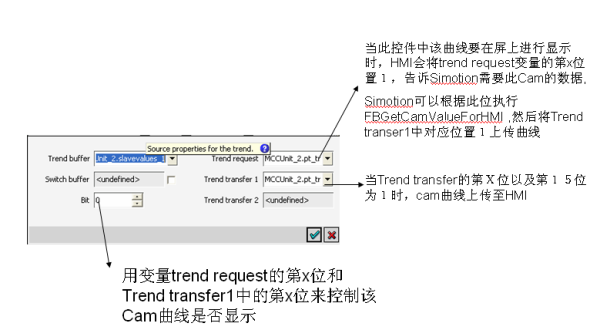
圖11: 趨勢圖設置
(4) 運行測試
完成后運行屏,顯示曲線畫面后,myTremdrequest第0位置1: 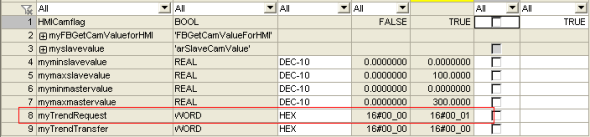
圖12: 運行測試
將myTrendtransfer設為H8001后,即將第0,15位置1后,曲線上傳至HMI: 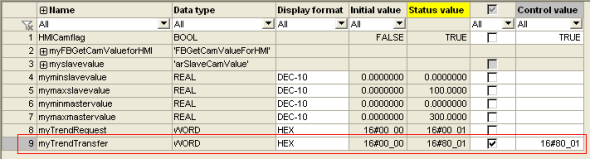
圖13: 運行測試
在屏上顯示Cam曲線: 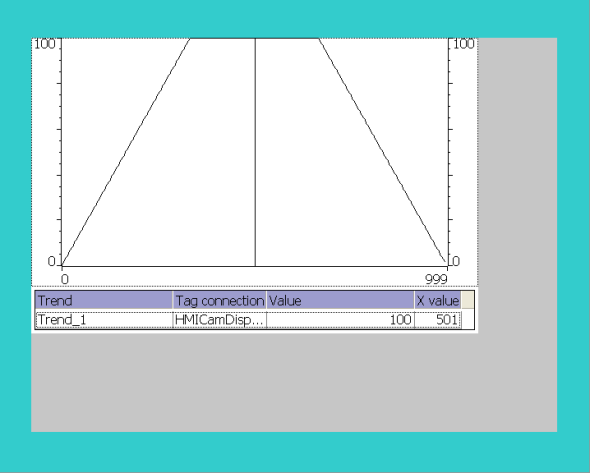
圖14: 運行測試
3 示例程序 概況:
在沒有PLC的情況下,通過西門子組態軟件WinCC Flexible,可以實現SINAMICS S120和屏的直接通訊。那么不通過PLC,如何在HMI設備上直接顯示SINAMICS S120的故障或報警信息?本文以CU320 和MP270間的通訊為例介紹。 系統環境:Windows XP Professional SP3 English Edition
軟件環境:Step 7 V5.4 + SP5;WinCC Flexible 2008;Scout V4.1.5
硬件信息:PG/PC;CU320;雙軸電機模塊;MP270
網絡拓撲結構: 
圖1 網絡拓撲圖
Profibus DP 網絡地址:
CU320 :4
MP270 :1電 話:(同號)
工業以太網地址設定:
PG/PC :192.168.0.88
MP270 :192.168.0.11
CU及驅動的裝置號(如圖2所示): 
圖2 裝置號
S120驅動器的調試過程請參考其他文檔,在完成驅動器的基本調試后,才能進行以下的工作。 2. WinCC Flexible配置 STEP1:打開STEP 7 軟件,插入一個HMI Station。 
圖3 插入HMI站
STEP2:選擇相應的屏和版本。 
圖4 選擇屏的型號
如果版本不對,可通過OS更新來達到*。 
圖5 OS更新
STEP3:打開WinCC Flexible,建立新的連接: 
圖6 通訊連接設定
STEP4:建立變量: 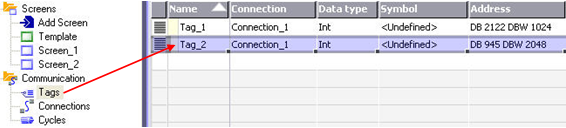
圖7 新建變量
變量地址的設定規則如下:
DB := 參數號
DBx := 1024*裝置號 + 參數下標
其中,x可為W或D,根據S120參數的數據類型而定。裝置號參見圖2。
如果要在屏上顯示故障或報警信息,可通過讀取相應的參數來實現。
舉例說明: 1. 顯示CU的報警代碼Alarm Code,參數為r2122.0 ~ r2122.63。其中,r2122.0~r2122.7存儲的是當前出現的報警代碼,如果被確認復位后,則被存儲在r2122.8 ~r2122.15 中,依次向后類推直至r2122.56 ~ r2122.63。如果希望進一步獲得報警值,可讀取參數r2124.0 ~ r2124.63。與r2122.0 ~ r2122.63是一一對應的。
建立變量,變量地址為DB2122.DBW1024,數據類型:Int;其中DBW中的1024 = 1024*1(裝置號)+ 0 (參數下標) 2. 顯示驅動器的故障代碼Fault Code,參數為r945.0 ~ r945.63。其中,r945.0~r945.7存儲的是當前出現的故障代碼,如果被確認復位后,則被存儲在r945.8 ~r945.15 中,依次向后類推直至r945.56 ~ r945.63。如果希望進一步獲得故障值,可讀取參數r949.0 ~ r949.63。與r945.0 ~ r945.63是一一對應的。
建立變量,變量地址為DB945.DBW2048,數據類型:Int ;其中DBW中的2048 = 1024*2 (裝置號)+ 0 (參數下標)。 STEP5:進行屏組態數據下載的設置: 
圖8 下載方式設置
STEP6:設定PG/PC的IP地址,與屏在同一網段: 
圖9 PG/PC的IP地址設置
STEP7:組態屏來顯示S120的故障、報警信息,建立與S120的直接通訊連接,并下載屏的組態數據。 概述電 話:(同號)
本文以 TP270與SIMOTION D435連接為例,介紹了SIMOTION D435與HMI如何進行硬件組態、變量連接、報警信息的建立。
HMI人機界面可以通過PROFIBUS或者Ethernet與SIMOTION 進行連接通訊。通過SIMOTION 設備中工藝對象的變量表、系統變量表及用戶定義的全局變量表可實現SIMOTION 設備與HMI操作面板間進行數據交換。
可用于與SIMOTION 連接的HMI操作面板如下表1所示: 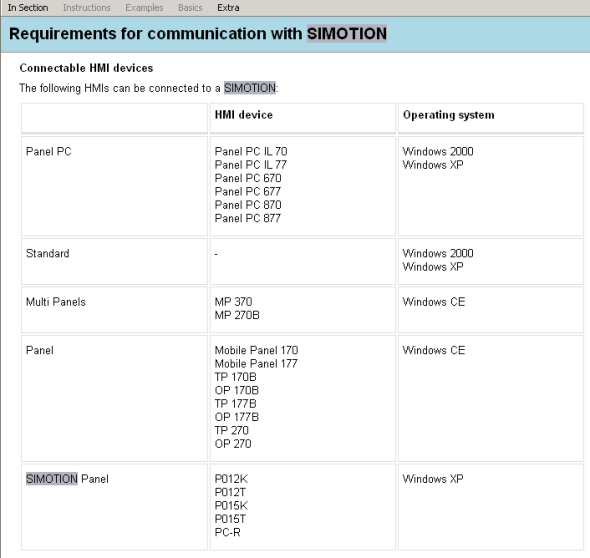
表1. 可與SIMOTION 連接的HMI操作面板
可以用Winccflexible,ProTool/Pro來進行配置
二、系統配置:
1. 一臺插有CP5511 或CP5512的計算機(裝有 SIMATIC S7 V5.4、SCOUT V4.0、ProTool/Protool CS V6.0+SP3、ProTool/Pro RT V6.0+SP3或Winccflexible)
2. HMI (TP270 ) 及用于TP270的直流24V電源
3. 一臺 SIMOTION D435Demo設備
4. ProfiBus 總線及連接器(連接于TP270的 1FB1(DP)口及SIMOTION的DP口)
三、SIMOTION網絡地址的設定
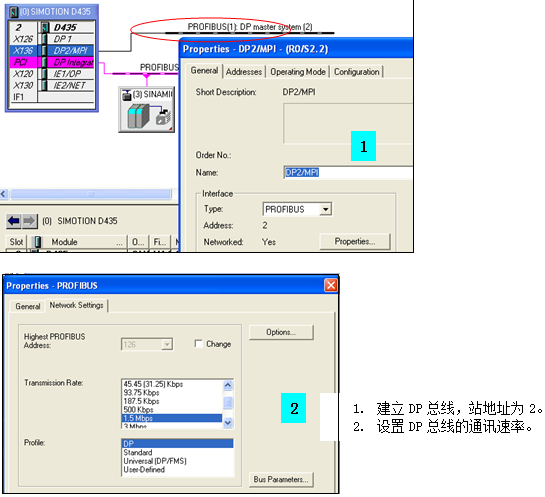
圖1.
四、PG/PC的設置
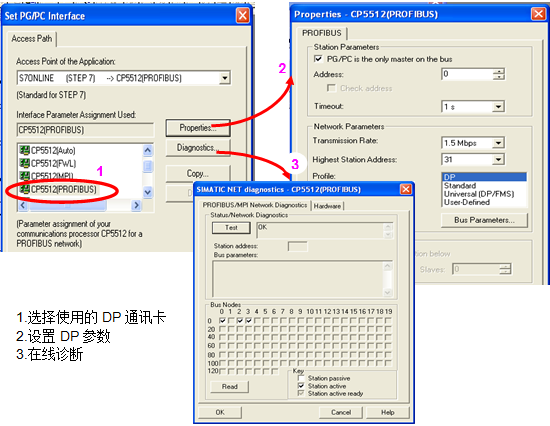
圖2.
五、ProTool中的項目配置
1.將HMI 項目集成到Step7中,鉤上“ ProTool Intergration inStep7 前面的 ”√“即可 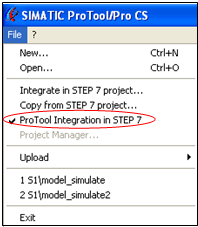
圖3.
2. 在STEP7中打開項目,插入OP站 
圖4.
雙擊插入后的OP站
3. 正確選擇使用的 HMI

圖5.
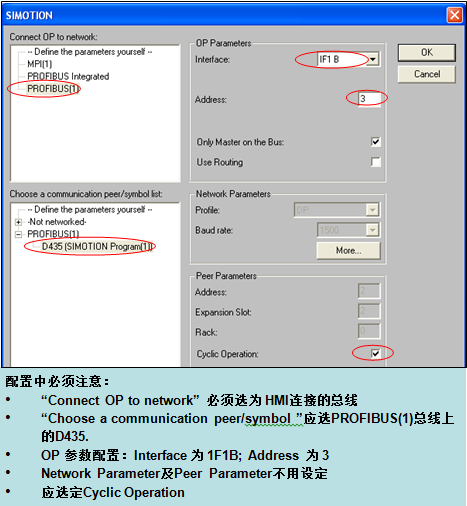
圖6.
電 話:(同號) 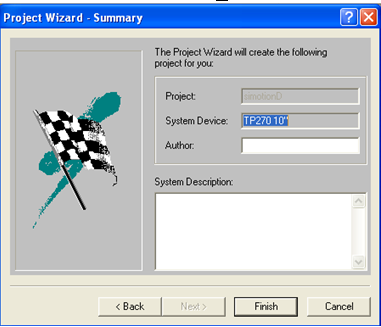
圖7.
4. HMI項目下載端口設置
HMI項目下載需校核下載端口,本 Demo 中使用 TP270 的 DP 口,因 此設置如下: 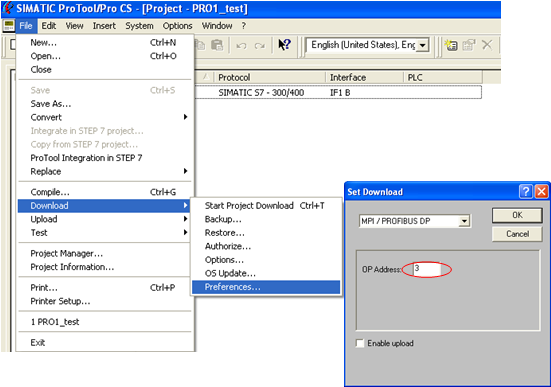
圖8.
六、SIMOTION中變量的定義
SIMOTION中配置的如下變量才能在HMI中被應用:
1.程序unit中配置的全局變量(圖9)。
2.在“I/O ”中定義的變量(圖10)。
3.在“GLOBAL DEVICE VARIABLES”中定義的變量(圖11)。 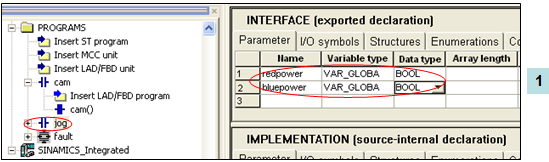
圖9.
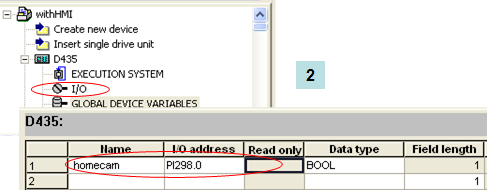
圖10.
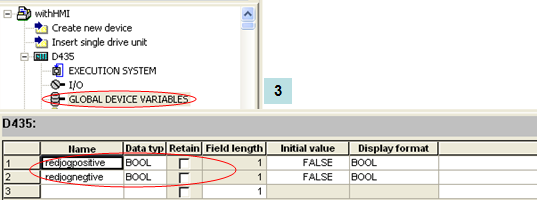
圖11.
七、HMI中變量的定義
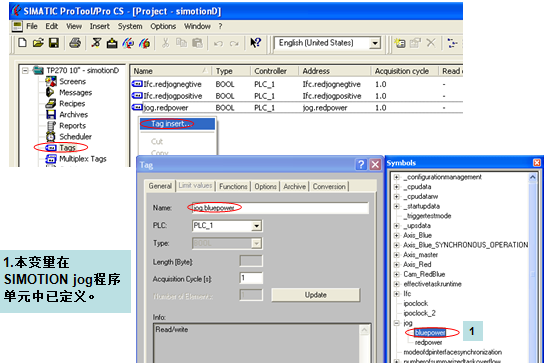
圖12.
在HMI中新建變量時,會自動彈出SIMOTION中變量表,選擇所需變量即可。
八、HMI中位掃描報警方式的配置
用于在HMI系統中顯示機器的故障或狀態信息, HMI通過掃描報警位,顯示報警信息。
1.報警信息區域指針的建立 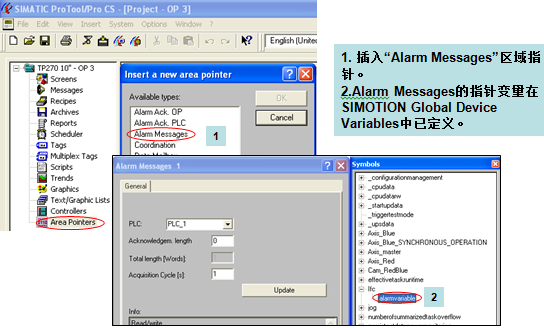
圖13.
2.報警消息的建立 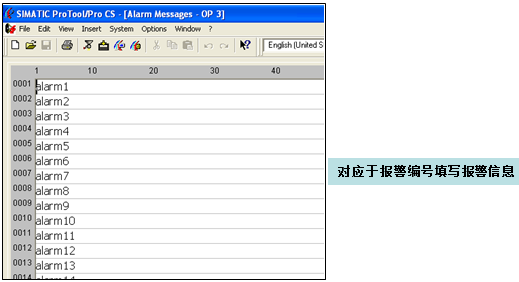
圖14.
九、Alarm_S報警方式配置
用于在HMI系統中顯示機器的故障或狀態信息, 可分級顯示報警信息。HMI不掃描報警位,報警信息的顯示通過在SIMOTION中編程觸發,這種報警方式可不占用HMI的總線通訊資源。
HMI側配置
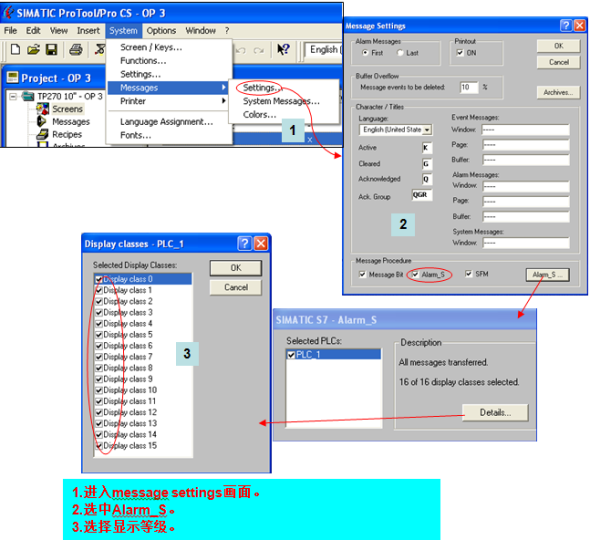
圖15.
HMI側報警信息窗口配置 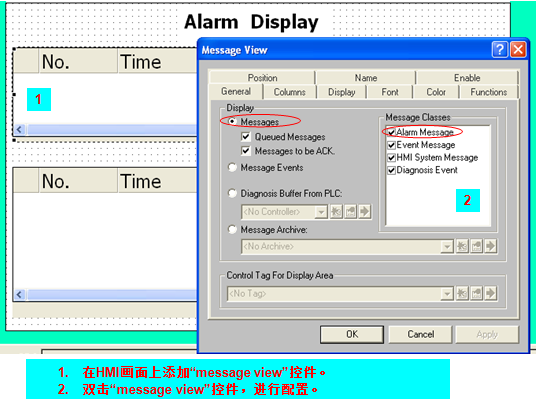
圖16.
1. SIMOTION側配置 
圖17.
2. SIMOTION側編程
(1)通過調用系統函數,如圖18所示,來實現SIMOTION中報警信息的編程觸發。 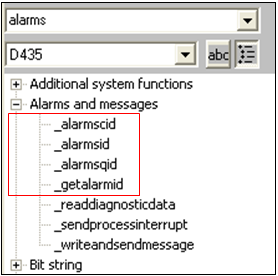
- 由于前端平滑而堅固,非常適合絕大多數市場領域(汽車、食品與飲料、石油與天然氣等),甚至可在危險區域使用(請參見技術數據)
- 接線很少,操作直觀、快速,十分方便
- 按鍵中具有多種顏色的 LED 燈,可不通過語言提供反饋信息,即使在陽光下也能讀取
- 內置型面板可進行擴展,無需使用切割工具
- 靈活性高,適合機器制造
- SIMATIC HMI 按鍵式面板 – 空白前面板設計
電 話:(同號)- 可以使用安裝架簡便安裝
- 采用堅固的設計,適用于惡劣的工業環境
- 可安裝 22.5 mm 標準部件
- 標準 22.5 mm 操作部件安裝方便,便于在運行期間進行改裝
SIMATIC HMI 按鍵式面板 – 基本功能 - 光滑的前端,易于清潔
- 可對大號機械帶照明按鈕單元進行編程,以作為開關或按鈕使用
- 24 VDC 回路電源,無需附加端子
- 兩個 PROFINET 接口,非常適合總線型操作
- 采用介質冗余協議 (MRP),適合環網運行,即使在 PROFINET 電源電纜斷開的情況下,也可正常運行
- 輸入和輸出位于后部,每個針腳都可用作輸入或輸出
- F 型號還配備有 SIL 2/3 輸入
SIMATIC HMI KP8 PN - 8 個帶機械照明的大號按鈕具有良好的觸覺反饋,因此也適合在惡劣的工業環境中使用。
- 8 個可自由組態的數字量 I/O
- 用于標準型 CPU
SIMATIC HMI KP8F PN - 具有額外的數字量故障安全輸入,用于連接單通道或一個雙通道傳感器(例如,用于急停)
- 用于故障安全 CPU
SIMATIC HMI KP32F PN - 32 個帶機械照明的大號按鈕具有良好的觸覺反饋,因此也適合在惡劣的工業環境中使用。
- 16 個可自由組態的數字量 I/O
- 具有額外的數字量故障安全輸入,用于 4 個單通道或 2 個雙通道傳感器(例如,用于急停)
- 用于故障安全和標準型 CPU
演示箱 SIMATIC HMI 按鍵式面板 – 低成本演示和實驗箱 該箱包含一個用于 1211C CPU的 KP8(含演示程序),放置在一個隨時備用的小型有機玻璃支架上。 - 內容:
- 1x 箱
- 1x KP8 PN
- 1x CPU1211C
- 1x 支架,固定接線,包括程序
- 可通過一個標準的便攜式 PC 電源適配器供電(電源適配器不在供貨范圍內)
根據要求提供價格與交貨時間 -
| 
















