
北京靈思創奇科技有限公司

北京靈思創奇科技有限公司
| 產地 | 國產 | 加工定制 | 是 |
|---|
一、產品概述
實時仿真機是一種嵌入式工業計算機,具備豐富的I/O資源,并運行嵌入式實時操作系統。面向不同的應用場景,我公司提供多種類型的實時仿真機供用戶選擇。
二、特征優勢
1、支持RCP快速原型設計
實現用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉換;
2、支持HIL硬件在回路測試
用戶的控制器等實物設備可以直接與Links-Box快速原型仿真器連接,動態驗證實物控制器性
一、平臺概述
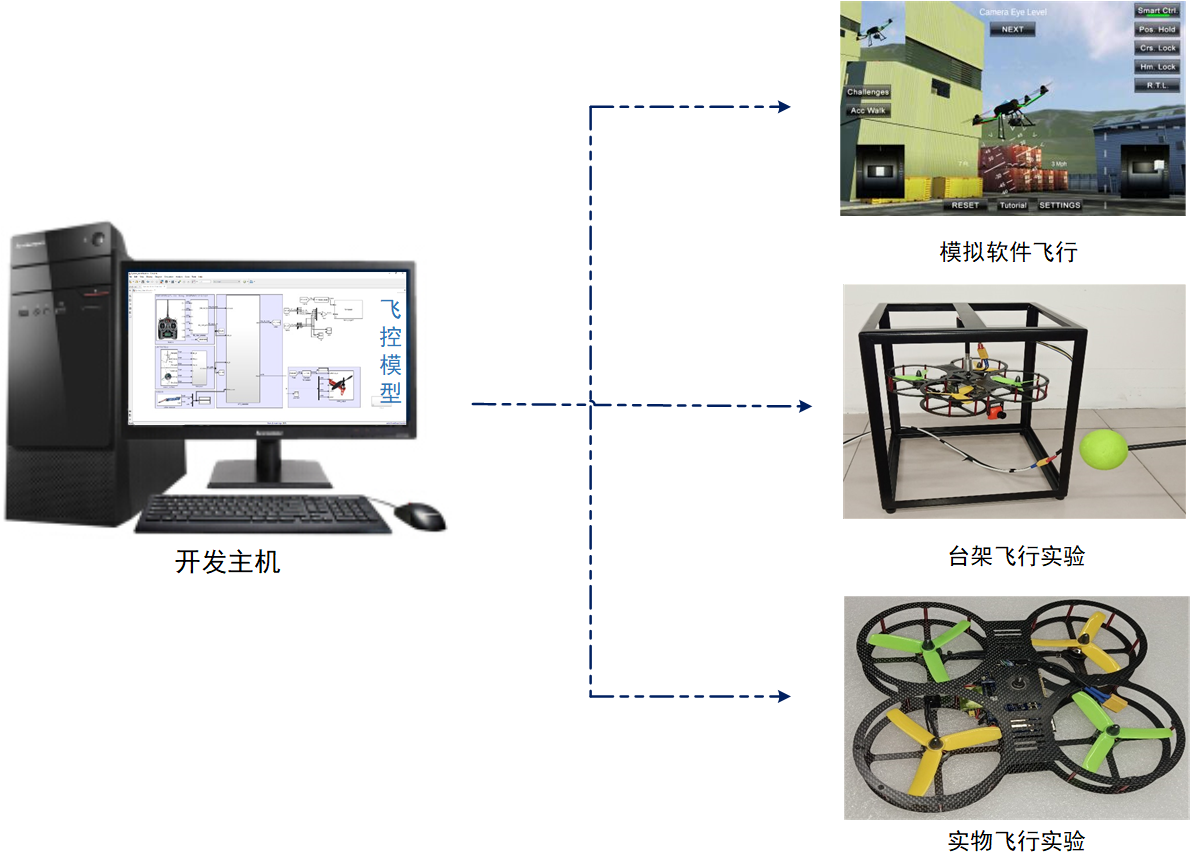
四旋翼飛行控制實驗平臺是集教學與科研目的為一體的多功能實驗臺,其在滿足日常學生教學實驗的同時,兼顧無人機平臺姿態控制、制導導航、力學等學科專業的科學研究。本平臺采用*的基于模型的設計(MBD)開發思路,可支撐控制系統數學仿真實驗、模擬軟件飛行實驗、臺架實驗、實物飛行實驗,具備模型編譯、下載、數據監視記錄、后處理等完成的工具軟件,能夠幫助學生熟悉整套控制系統設計流程。
二、特征優勢
1、基于模型設計(MBD)
平臺采用*的基于模型設計(MBD)的開發思路;
2、實驗支撐
同時支持數學仿真實驗、模擬軟件飛行實驗、臺架實驗和實物飛行實驗;
3、硬件配置
主控芯片采用功能強大和擴展性強的芯片AM335x 1GHz ARM® Cortex-A8 processor,擁有豐富的外設資源和強大的運算能力;
4、圖像處理
具備前置攝像頭,結合圖形處理芯片,完成圖像采集和實時處理;
5、控制器開發
結合基于MATLAB Simulink和ARM的快速控制原型系統的使用,可以快速實現控制器的開發,自動代碼生成。
三、實驗內容
1、建模實驗
?仿真實物分析實驗 ?油門響應對比實驗 ? 數據分析建模實驗
2、濾波實驗
?互補濾波實驗 ?濾波參數對比實驗 ?卡爾曼濾波實驗
3、姿態控制實驗
?系統穩定分析實驗 ?PID參數調節實驗 ?矯正器設計驗證實驗
4、圖像跟蹤實驗
?RGB圖像分析實驗 ?HSV圖像分析實驗 ?視覺伺服跟蹤實驗
四、實驗示例
1、IMU數據獲取與姿態解算
1)實驗目的
?熟悉IMU傳感器基本原理; ?學習基本kalman濾波的原理和應用。
2)實驗原理
飛行器姿態(滾轉、俯仰、偏航角)測值并非直接來源于機上傳感器,而是依據姿態測量原理,由集成傳感器的原始測值經過‘vehicle_attitude’模塊內置姿態計算方法計算后得到。該模塊內置了兩種姿態計算方法,基于加速度計、陀螺儀和磁力計測值的默認計算方法和擴展卡爾曼濾波器(Extended Kalman Filter)。
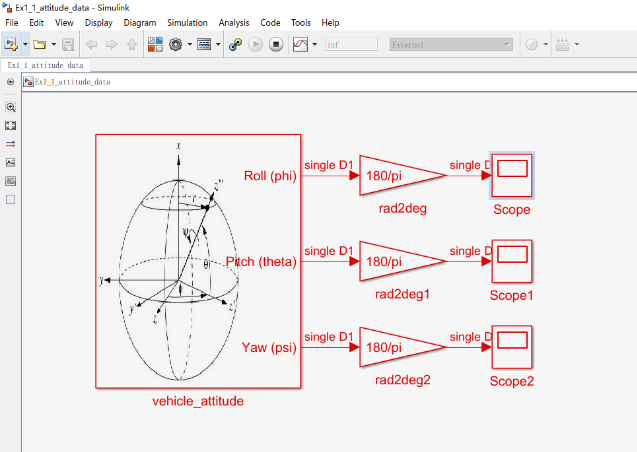
姿態測量模型
3)實驗過程
A.數值仿真實驗
Step1: 直接運行
Step2: 打開示波器,結果如下圖所示,從結果可以看出,估計值能夠很好的符合實際值。
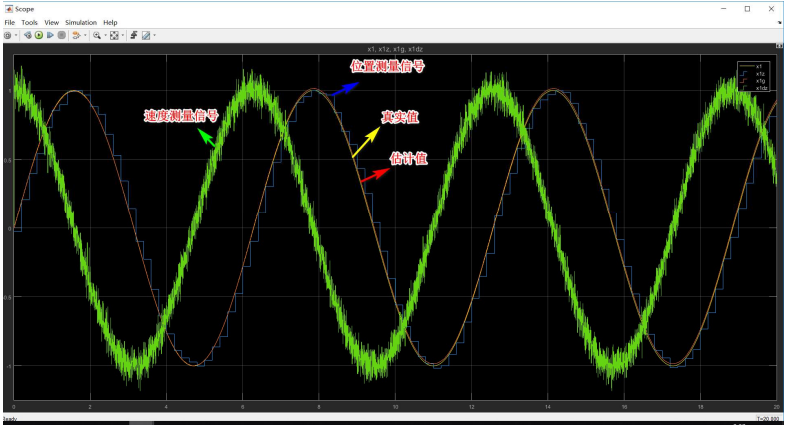
卡爾曼數值仿真實驗結果
B.臺架實物實驗
Step1: 打開Simulink模型
Step2: 無人機實物上電
Step3: 編譯下載模型,上傳固件信息
Step4: 手動擺動四旋翼,在Simulink監控界面觀察上傳的四旋翼姿態數據
Step5: 停止模型
Step6:關閉無人機。
2、基于顏色的綠球跟蹤實驗
1)實驗目的
?了解跟蹤控制基本原理 ?了解圖像處理基本過程 ?了解分層控制器的設計思想
2)實驗原理
以前置相機中的綠球為跟蹤對象,其目的是保持綠球在圖像的中心位置(坐標原點)。當綠球在圖像中左右移動時會產生一個x方向的位移,將此作為偏差輸入PID控制器產生一個偏航角的控制量,作為姿態控制器的期望值。當綠球在圖像中上下移動時會產生一個y軸方向的位移,將此作為偏差輸入PID控制器產生一個俯仰角的控制量,作為姿態控制器的期望值。經過兩個PID控制器,將使得綠球能夠保持在圖像的中心,移動綠球,無人機的機頭就會跟隨移動,這就是綠球跟蹤的基本原理。
如下圖所示,綠球跟蹤控制系統采用分層控制思想,上層為綠球跟蹤控制器(BBB板載ARM處理器),下層為無人機姿態控制器(BBB板載GPU處理器),上層的控制器輸出作為下一層控制器的給定輸入。
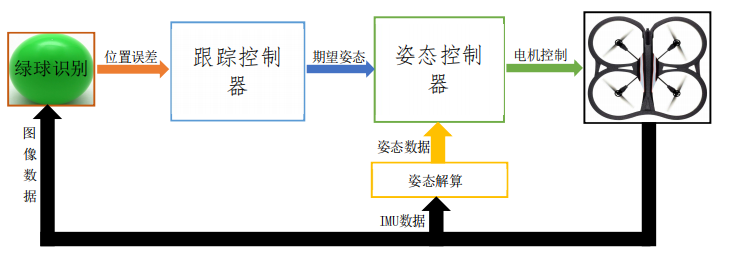
綠球跟蹤控制系統原理圖
3)實驗過程
Step1:打開模型
Step2:無人機實物上電
Step3:編譯下載模型,上傳固件
Step4:運行模型
Step5:運動綠球,觀察無人機跟蹤情況
Step6:調整PID控制器參數,優化跟蹤效果
Step7:停止模型
Step8:關閉無人機
4)實驗討論:
?分層控制的設計思路和特點 ?將顏色跟蹤改為形狀跟蹤甚至人臉跟蹤等。
五、選型配置
產品名稱 | 產品型號 | 系統配置 | |
四旋翼飛行控制實驗平臺 | LINKS-ES-UAV-01 (基礎教學) | 無人機實驗臺架 | Links-UAV-MiniBench |
飛控代碼自動化生成工具 | Links-AutoCoder-Gen | ||
飛控外設模型庫 | Links-AutoCoder-DevLib | ||
Simulnk實驗示例包 | Links-UAV-SimulinkDemo | ||
模擬飛行軟件 | Links-UAV- Flight Software | ||
四旋翼無人機(選配) | Links-UAV- MiniRealPlane | ||
LINKS-RS-UAV-01 (教學/科研) | 無人機實驗臺架 | Links-UAV-LargeBench | |
飛控代碼自動化生成工具 | Links-AutoCoder-Gen | ||
飛控外設模型庫 | Links-AutoCoder-DevLib | ||
Simulnk實驗示例包 | Links-UAV-SimulinkDemo | ||
模擬飛行軟件 | Links-UAV- Flight Software | ||
四旋翼無人機(選配) | Links-UAV- LargeRealPlane | ||
六、部分用戶
?北京航空航天大學 ?西北工業大學 ?華東交通大學 ?桂林航天工業學院 ?中南大學 ?重慶大學 ?南昌航空大學
?北京理工大學 ?中北大學 ?北京聯合大學 ?臺州學院 ?濱州學院 ?滇西科技師范學院
?北京信息科技大學 ?廣西大學 ?西南交通大學 ?*南海海洋研究所 ?哈爾濱工業大學 ?中山大學珠海學院


您感興趣的產品PRODUCTS YOU ARE INTERESTED IN






儀表網 設計制作,未經允許翻錄必究 .? ? ?
請輸入賬號
請輸入密碼
請輸驗證碼








